FIERY: Future Instance Prediction in Bird's-Eye View
from Surround Monocular Cameras
Anthony Hu Zak Murez Nikhil Mohan Sofía Dudas
Jeffrey Hawke Vijay Badrinarayanan Roberto Cipolla Alex Kendall
Wayve, University of Cambridge
Paper Blog Code
Autonomous driving is inherently a geometric problem, where the goal is to navigate a vehicle safely and correctly
through 3D space. As such, an orthographic bird’s-eye view (BEV) perspective is commonly used for motion planning and
prediction based on LiDAR sensing.
Over recent years, we’ve seen advances in camera-based perception rival LiDAR-based perception, and we anticipate that this will also be possible for wider monocular vision tasks, including prediction. Building a perception and prediction system based on cameras would enable a leaner, cheaper and higher resolution visual recognition system over LiDAR sensing.
We present FIERY: a future instance prediction model in bird’s-eye view from monocular cameras only. Our model predicts future instance segmentation and motion of dynamic agents that can be transformed into non-parametric future trajectories.
Our approach combines the perception, sensor fusion and prediction components of a traditional autonomous driving stack end-to-end, by estimating bird’s-eye-view prediction directly from surround RGB monocular camera inputs. We favour an end-to-end approach as it allows us to directly optimise our representation, rather than decoupling those modules in a multi-stage discrete pipeline of tasks which is prone to cascading errors and high-latency.
Further, classical autonomous driving stacks tackle future prediction by extrapolating the current behaviour of dynamic agents, without taking into account possible interactions. They rely on HD maps and use road connectivity to generate a set of future trajectories. In contrast, FIERY learns to predict future motion of dynamic agents directly from camera driving data in an end-to-end manner, without relying on HD maps or LiDAR sensing. It can reason about the inherent stochastic nature of the future, and predicts multimodal future trajectories as shown in the video below.
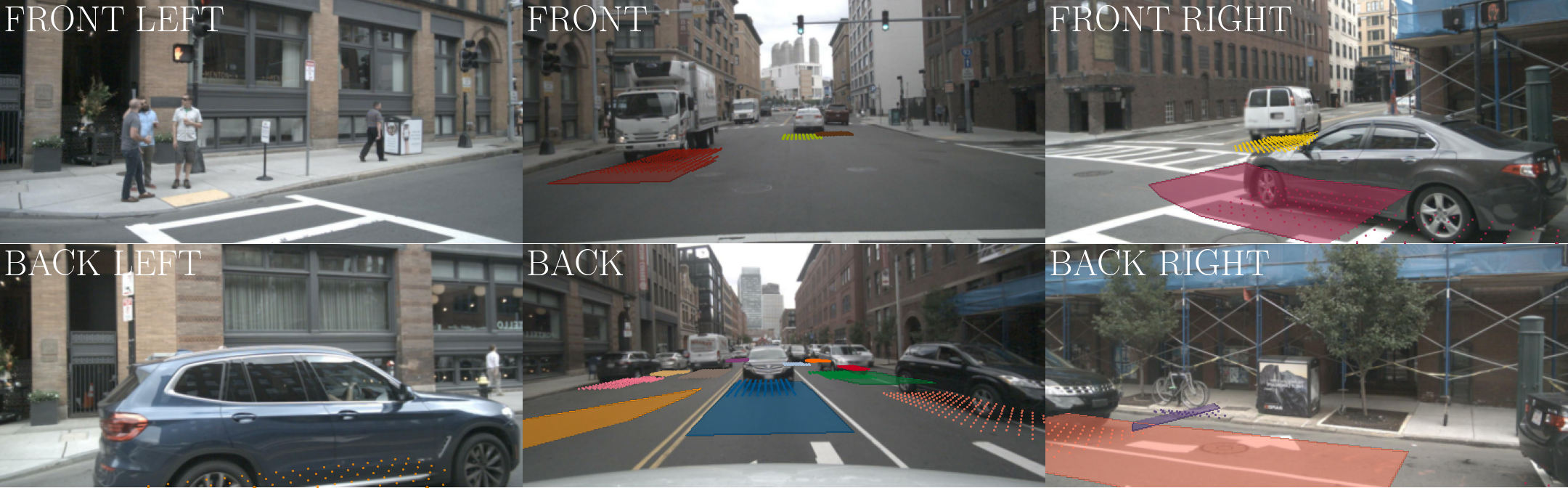
Top two rows: RGB camera inputs. The predicted future trajectories and segmentations are projected to the ground plane in the images.
Bottom row: future instance prediction in bird’s-eye view in a 100m×100m capture size around the ego-vehicle, which is indicated by a black rectangle in the center.